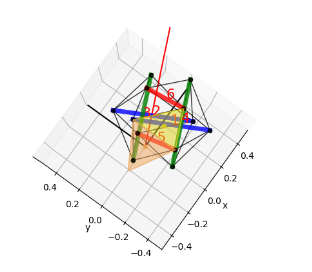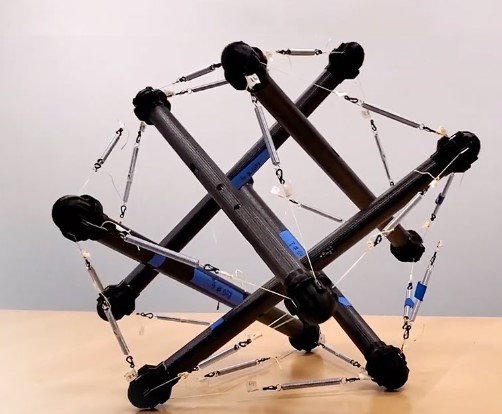
Tensegrity robots have the untapped potential to revolutionize the field of space exploration and disaster relief. Their simple tensegrity structure, built with 6 carbon fiber rods and fishing line cables to assure tension and structural integrity, allows it to navigate complex terrains such as rubble and sand while gathering data.
Our project is two-fold: improvising the state estimation of the robot with new sensors, and developing flexible control algorithms to increase its speed and resilience on rough terrains as well as inclined surfaces.
The tools we are using involve control simulation and algorithms using Python, sensor calibration and estimation - Force sensitive resistors (FSRs), IMUs, Motor encoders - and 3D prototyping for end cap design.
We hope to accomplish robust and optimal locomotion strategies based on intelligent readings of sensor data.