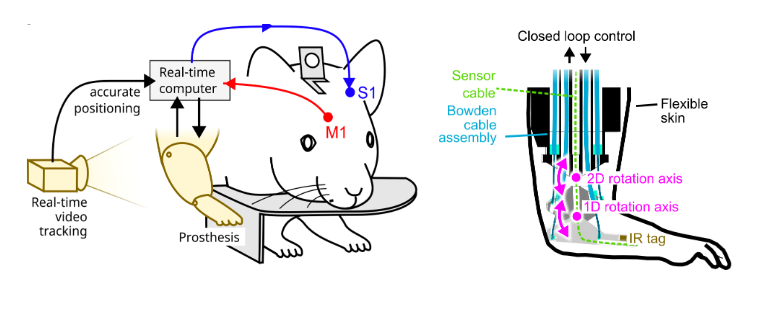
Our study focuses on designing and controlling a prosthetic arm for mice that is controlled via a brain-computer interface on the mice.
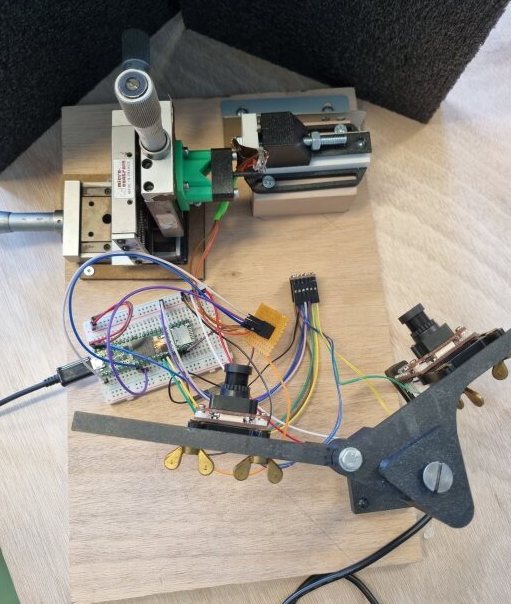
This required a high degree of precision in engineering the dynamic and kinematic models. Taking in account elasticity and tensioning of cables in actuation. Actual kinematic validation was achieved with Matlab.
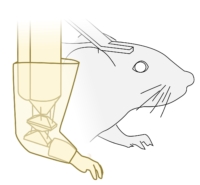
In our research, this miniaturized mouse forelimb prosthetic served to investigate artificial structures' impact on neuroprosthetic control and study the sensory feedback-induced prosthesis appropriation by the mouse.