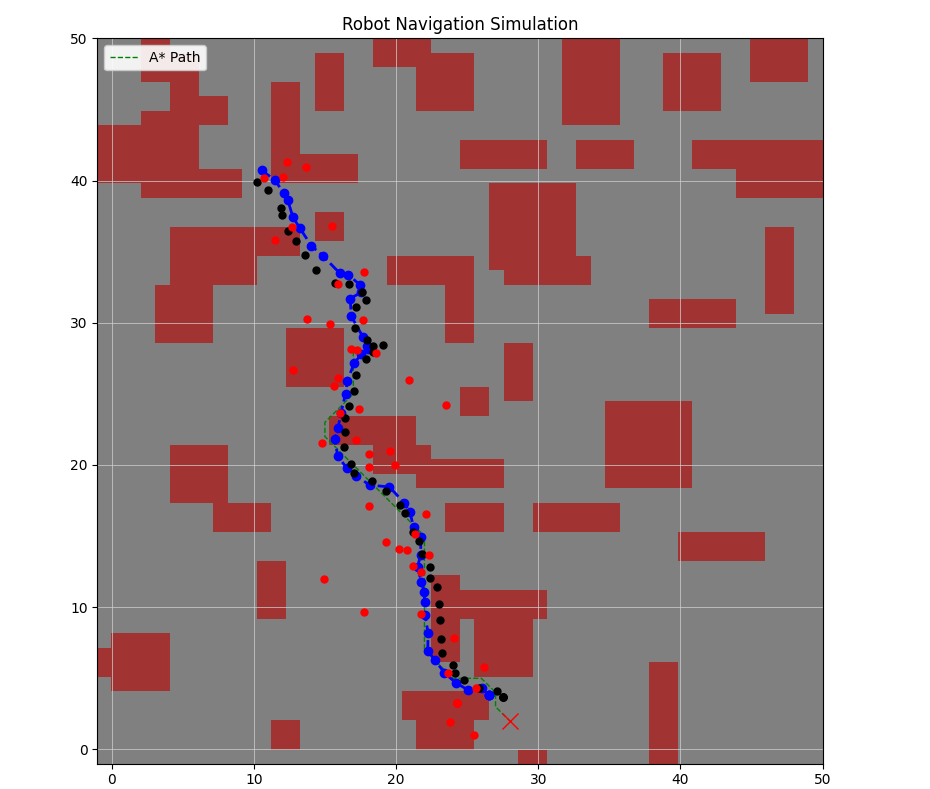
Personal project combining Kalman Filtering, PID control and graph-search algorithm to lead a robot vehicle on a randomised environment with obstacles.
The user simply chooses an objective on the "factory floor" and can adjust after parameters such as process and measurement noise (Kalman) and PID parameters.
Implementation in Python using essentially only object-oriented programming. (Entirely built myself, posted on Github).
