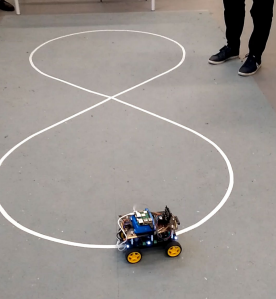
Autonomous vehicle project by Stellantis & CentraleSupélec. Format was a competition between groups of students to engineer quickest and most reliable autonomous vehicle.
Challenge was to follow different types of tracks and find optimal path in all.
I built different computer vision algorithms and state estimation techniques based off radar and camera information. I also built motor control algorithms adapting to updating objectives and developed optimal path search.