We employed Model Predictive Control (MPC) to provide optimized rover control inputs for efficient inchworming on a slope.
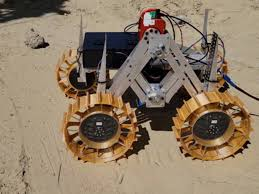
We devised state equations to simplify the intricate dynamics of a push-pull rover.
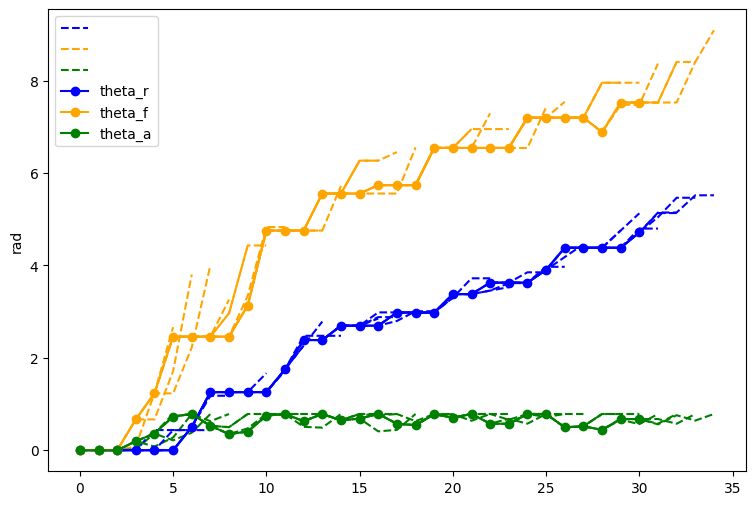
Through numerical experiments and different parameters, MPC showed an interesting approach combining push pull and wheel speed to optimize movement depending on input and state constraints.